
Page 206 - Control Theory in Biomedical Engineering
P. 206
Medical robotics 187
Table 3 Commercial exoskeleton devices.
Name Company Country DOF Training furthers
CyberGrasp CyberGlove US 4 Extension and flexion
Systems Inc. of fingers
Hand of Hope Rehab-Robotics China 5 Move each finger
Company separately
Gloreha-Hand Gloreha Italy 5 Hand continuous passive
motion training
Hand Mentor Motus Nova US 1 Hand passive/assistive
motion training
ReoGo Motorika US 4 Shoulder, elbow and also
USA Inc. wrist training or fingers
if special handle is used.
Ekso Ekso Bionics US 6 Medical-Paraplegics
Rex Rex Bionics Australia – Medical-Paraplegics
Pty Ltd.
Phoenix SuitX (formerly US – Medical-Compensation
US Bionics)
Walking Assist Honda Japan 2 Walking Assist
Roki Roki Robotics Mexico 4 Walking Assist
HAL Cyberdyne Japan – Full-body exoskeleton for
the arms, legs, and torso
controlled by human
minds.
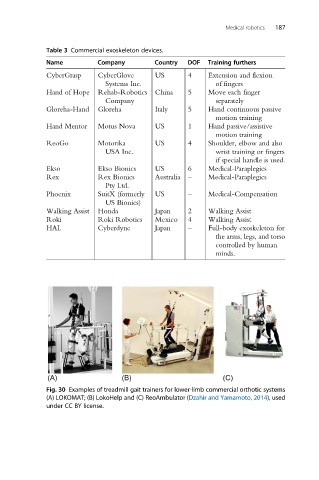
Fig. 30 Examples of treadmill gait trainers for lower-limb commercial orthotic systems
(A) LOKOMAT; (B) LokoHelp and (C) ReoAmbulator (Dzahir and Yamamoto, 2014), used
under CC BY license.