
Page 225 - Control Theory in Biomedical Engineering
P. 225
206 Control theory in biomedical engineering
for augmenting strength to lift heavy objects or enhance gait or running (also
e
known as extenders) (Maciejasz et al., 2014; Jarrass et al., 2014; Shen and
Rosen, 2020); orthotic robots for rehabilitation and assistance after a disease
such as stroke; and prosthetic robots for replacing a lost limb, either upper or
lower, to recover lost function such as grasping or walking (Nemah et al.,
2019; Voloshina and Collins, 2020; Castellini, 2020). All these WDs rely
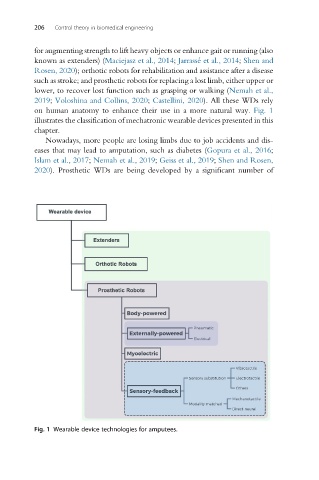
on human anatomy to enhance their use in a more natural way. Fig. 1
illustrates the classification of mechatronic wearable devices presented in this
chapter.
Nowadays, more people are losing limbs due to job accidents and dis-
eases that may lead to amputation, such as diabetes (Gopura et al., 2016;
Islam et al., 2017; Nemah et al., 2019; Geiss et al., 2019; Shen and Rosen,
2020). Prosthetic WDs are being developed by a significant number of
Fig. 1 Wearable device technologies for amputees.