
Page 619 - Corrosion Engineering Principles and Practice
P. 619
582 C h a p t e r 1 3 C a t h o d i c P r o t e c t i o n 583
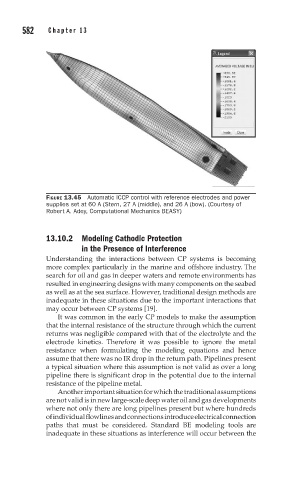
FIGURE 13.45 Automatic ICCP control with reference electrodes and power
supplies set at 60 A (Stern, 27 A (middle), and 26 A (bow). (Courtesy of
Robert A. Adey, Computational Mechanics BEASY)
13.10.2 Modeling Cathodic Protection
in the Presence of Interference
Understanding the interactions between CP systems is becoming
more complex particularly in the marine and offshore industry. The
search for oil and gas in deeper waters and remote environments has
resulted in engineering designs with many components on the seabed
as well as at the sea surface. However, traditional design methods are
inadequate in these situations due to the important interactions that
may occur between CP systems [19].
It was common in the early CP models to make the assumption
that the internal resistance of the structure through which the current
returns was negligible compared with that of the electrolyte and the
electrode kinetics. Therefore it was possible to ignore the metal
resistance when formulating the modeling equations and hence
assume that there was no IR drop in the return path. Pipelines present
a typical situation where this assumption is not valid as over a long
pipeline there is significant drop in the potential due to the internal
resistance of the pipeline metal.
Another important situation for which the traditional assumptions
are not valid is in new large-scale deep water oil and gas developments
where not only there are long pipelines present but where hundreds
of individual flowlines and connections introduce electrical connection
paths that must be considered. Standard BE modeling tools are
inadequate in these situations as interference will occur between the