
Page 230 - Designing Autonomous Mobile Robots : Inside the Mindo f an Intellegent Machine
P. 230
Becoming Unstuck in Time
Apparent wall
Actual wall
First range reading
Last range reading
C
End of scan
B
A
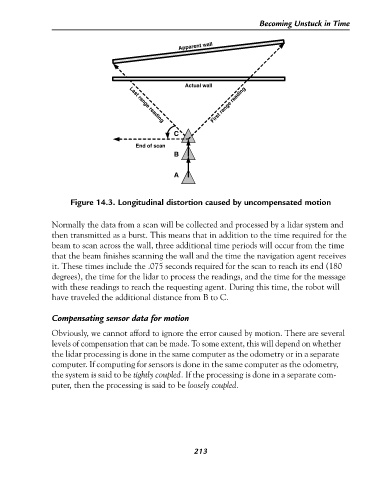
Figure 14.3. Longitudinal distortion caused by uncompensated motion
Normally the data from a scan will be collected and processed by a lidar system and
then transmitted as a burst. This means that in addition to the time required for the
beam to scan across the wall, three additional time periods will occur from the time
that the beam finishes scanning the wall and the time the navigation agent receives
it. These times include the .075 seconds required for the scan to reach its end (180
degrees), the time for the lidar to process the readings, and the time for the message
with these readings to reach the requesting agent. During this time, the robot will
have traveled the additional distance from B to C.
Compensating sensor data for motion
Obviously, we cannot afford to ignore the error caused by motion. There are several
levels of compensation that can be made. To some extent, this will depend on whether
the lidar processing is done in the same computer as the odometry or in a separate
computer. If computing for sensors is done in the same computer as the odometry,
the system is said to be tightly coupled. If the processing is done in a separate com-
puter, then the processing is said to be loosely coupled.
213