
Page 232 - Designing Autonomous Mobile Robots : Inside the Mindo f an Intellegent Machine
P. 232
Becoming Unstuck in Time
As we have seen, even a GPS system does not offer us an azimuth estimate without
moving. True, if our vehicle was fairly long we could mount receivers on the front
and back to obtain a heading estimate, but what we are really doing is establishing
two simultaneous time-places.
For instance, if a robot is traveling down a hall using lidar or sonar it may receive
frequent lateral and azimuth corrections, but no longitudinal corrections for some
distance. Eventually it should reach a point where it can image a feature that indi-
cates its longitudinal position. Therefore, odometry is the key to gluing together
these cues about the environment. In this case, it is necessary that the odometry be
accurate enough longitudinally (distance traveled) to keep the position estimate
intact.
If your goal is to develop a very inexpensive, simple, or small robot, then you will
probably find lidar a bit pricey or bulky. The more limited the sensors available, the
more aggressively this concept of time-places must be embraced.
Beam 2
B Beam 1
b Reflector
d
Beam 2
a
A Beam 1
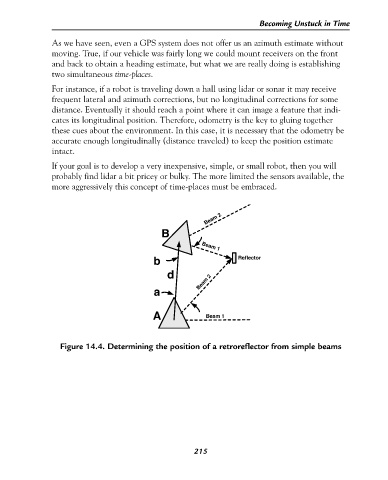
Figure 14.4. Determining the position of a retroreflector from simple beams
215