
Page 31 - Distributed model predictive control for plant-wide systems
P. 31
Introduction 5
y sp
Centralized Multivariable controller
y
u *
y 1 y 2 y 3 y m–1 y m
* * * * *
u 1 u 2 u 3 u m–1 u m
S *
Distributed
S Na system
S 1 S 2
S *
S 3 S Na-1
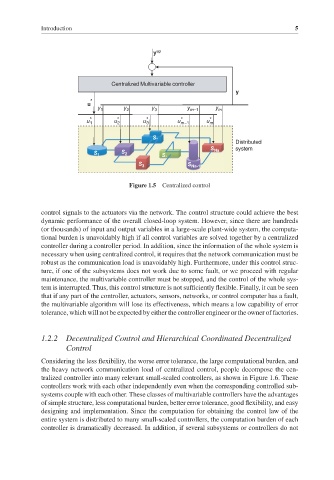
Figure 1.5 Centralized control
control signals to the actuators via the network. The control structure could achieve the best
dynamic performance of the overall closed-loop system. However, since there are hundreds
(or thousands) of input and output variables in a large-scale plant-wide system, the computa-
tional burden is unavoidably high if all control variables are solved together by a centralized
controller during a controller period. In addition, since the information of the whole system is
necessary when using centralized control, it requires that the network communication must be
robust as the communication load is unavoidably high. Furthermore, under this control struc-
ture, if one of the subsystems does not work due to some fault, or we proceed with regular
maintenance, the multivariable controller must be stopped, and the control of the whole sys-
tem is interrupted. Thus, this control structure is not sufficiently flexible. Finally, it can be seen
that if any part of the controller, actuators, sensors, networks, or control computer has a fault,
the multivariable algorithm will lose its effectiveness, which means a low capability of error
tolerance, which will not be expected by either the controller engineer or the owner of factories.
1.2.2 Decentralized Control and Hierarchical Coordinated Decentralized
Control
Considering the less flexibility, the worse error tolerance, the large computational burden, and
the heavy network communication load of centralized control, people decompose the cen-
tralized controller into many relevant small-scaled controllers, as shown in Figure 1.6. These
controllers work with each other independently even when the corresponding controlled sub-
systems couple with each other. These classes of multivariable controllers have the advantages
of simple structure, less computational burden, better error tolerance, good flexibility, and easy
designing and implementation. Since the computation for obtaining the control law of the
entire system is distributed to many small-scaled controllers, the computation burden of each
controller is dramatically decreased. In addition, if several subsystems or controllers do not