
Page 86 - Dynamic Vision for Perception and Control of Motion
P. 86
3 Subjects and Subject Classes
70
performance to this situation (see Figure 14.1). Usually in ground vehicle guid-
ance, slowing down or stopping under safe conditions is the way out for buying
more time for perception.
3.3.2.3 Capability Network for Active Vision
The perceptual capabilities discussed above can be grouped according to signal
flows required during execution and according to the complexity needed for solv-
ing typical classes of tasks. No general survey on active vision is intended here. A
number of publications dealing with this problem are [Aloimonos et al. 1987; Ballard
1991; Blake and Yuille 1992; more recent ones]. Here, we will follow the approach de-
veloped by [Pellkofer 2003] (see also [Pellkofer et al. 2001, 2002]).
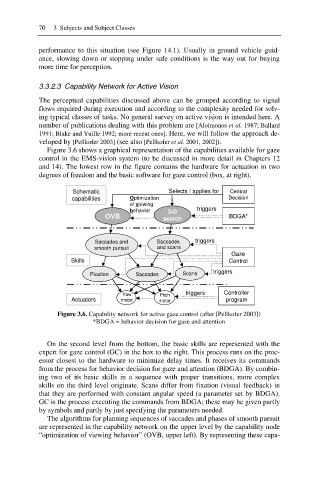
Figure 3.6 shows a graphical representation of the capabilities available for gaze
control in the EMS-vision system (to be discussed in more detail in Chapters 12
and 14). The lowest row in the figure contains the hardware for actuation in two
degrees of freedom and the basic software for gaze control (box, at right).
Schematic Selects / applies for Central
capabilities Optimization Decision
of viewing
behavior 3-D triggers
OVB search BDGA*
Saccades and Saccades triggers
smooth pursuit and scans
Gaze
Skills Control
Fixation Saccades Scans triggers
Yaw Pitch triggers Controller
Actuators motor motor program
Figure 3.6. Capability network for active gaze control (after [Pellkofer 2003])
*BDGA = behavior decision for gaze and attention
On the second level from the bottom, the basic skills are represented with the
expert for gaze control (GC) in the box to the right. This process runs on the proc-
essor closest to the hardware to minimize delay times. It receives its commands
from the process for behavior decision for gaze and attention (BDGA). By combin-
ing two of its basic skills in a sequence with proper transitions, more complex
skills on the third level originate. Scans differ from fixation (visual feedback) in
that they are performed with constant angular speed (a parameter set by BDGA).
GC is the process executing the commands from BDGA; these may be given partly
by symbols and partly by just specifying the parameters needed.
The algorithms for planning sequences of saccades and phases of smooth pursuit
are represented in the capability network on the upper level by the capability node
“optimization of viewing behavior” (OVB, upper left). By representing these capa-