
Page 193 - Dynamics of Mechanical Systems
P. 193
0593_C06_fm Page 174 Monday, May 6, 2002 2:28 PM
174 Dynamics of Mechanical Systems
ˆ
T (= M )
C Q
B Q F (= R)
A D
O
G
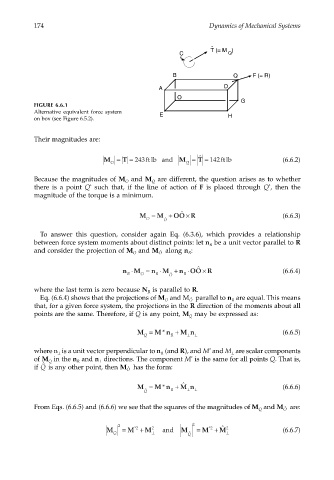
FIGURE 6.6.1
Alternative equivalent force system E
on box (see Figure 6.5.2). H
Their magnitudes are:
M = T = 243ftlb and M = T = 142ftlb (6.6.2)
ˆ
O Q
Because the magnitudes of M and M are different, the question arises as to whether
Q
O
there is a point Q such that, if the line of action of F is placed through Q , then the
*
*
magnitude of the torque is a minimum.
ˆ
M = M + OO R (6.6.3)
×
O O ˆ
To answer this question, consider again Eq. (6.3.6), which provides a relationship
between force system moments about distinct points: let n be a unit vector parallel to R
R
and consider the projection of M and M ˆ along n :
O
O
R
×
ˆ
n ⋅ M = n ⋅ M + n ⋅ OO R (6.6.4)
R O R O ˆ R
where the last term is zero because N is parallel to R.
R
Eq. (6.6.4) shows that the projections of M and M ˆ parallel to n are equal. This means
O
O
R
that, for a given force system, the projections in the R direction of the moments about all
points are the same. Therefore, if Q is any point, M may be expressed as:
Q
M = M n + M n (6.6.5)
*
Q R ⊥ ⊥
*
where n is a unit vector perpendicular to n (and R), and M and M are scalar components
⊥
⊥
R
*
of M in the n and n directions. The component M is the same for all points Q. That is,
⊥
R
Q
ˆ
Q
if is any other point, then M ˆ has the form:
O
M = M n + M n (6.6.6)
ˆ
*
Q ˆ R ⊥ ⊥
From Eqs. (6.6.5) and (6.6.6) we see that the squares of the magnitudes of M and M ˆ are:
O
Q
2 2
ˆ
2
2 *
2 *
M = M + M and M = M + M 2 (6.6.7)
Q ⊥ Q ˆ ⊥