
Page 190 - Dynamics of Mechanical Systems
P. 190
0593_C06_fm Page 171 Monday, May 6, 2002 2:28 PM
Forces and Force Systems 171
With the right sides of these equations being equal, we have:
ˆ
M SQ = M SQ (6.5.2)
If two force systems are equivalent and if one of the force systems contains fewer forces
than the other, it would follow that the force system with the fewer forces would be easier
to work with than the one with the greater number of forces.
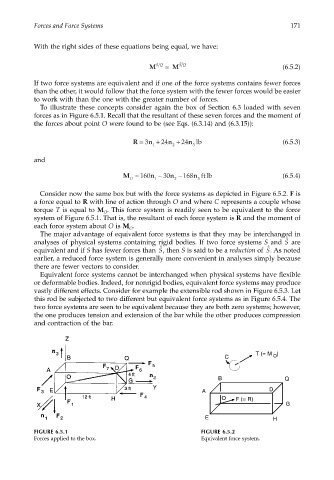
To illustrate these concepts consider again the box of Section 6.3 loaded with seven
forces as in Figure 6.5.1. Recall that the resultant of these seven forces and the moment of
the forces about point O were found to be (see Eqs. (6.3.14) and (6.3.15)):
R = 3 n + 24 n + 24 n lb (6.5.3)
1 2 3
and
M = 160 n − 30 n − 168 n ftlb (6.5.4)
O 1 2 3
Consider now the same box but with the force systems as depicted in Figure 6.5.2. F is
a force equal to R with line of action through O and where C represents a couple whose
torque T is equal to M . This force system is readily seen to be equivalent to the force
O
system of Figure 6.5.1. That is, the resultant of each force system is R and the moment of
each force system about O is M .
O
The major advantage of equivalent force systems is that they may be interchanged in
ˆ
analyses of physical systems containing rigid bodies. If two force systems S and are
S
ˆ
ˆ
equivalent and if S has fewer forces than , then S is said to be a reduction of . As noted
S
S
earlier, a reduced force system is generally more convenient in analyses simply because
there are fewer vectors to consider.
Equivalent force systems cannot be interchanged when physical systems have flexible
or deformable bodies. Indeed, for nonrigid bodies, equivalent force systems may produce
vastly different effects. Consider for example the extensible rod shown in Figure 6.5.3. Let
this rod be subjected to two different but equivalent force systems as in Figure 6.5.4. The
two force systems are seen to be equivalent because they are both zero systems; however,
the one produces tension and extension of the bar while the other produces compression
and contraction of the bar.
T (= M )
C O
B Q
A D
O F (= R)
G
E H
FIGURE 6.5.1 FIGURE 6.5.2
Forces applied to the box. Equivalent force system.