
Page 191 - Dynamics of Mechanical Systems
P. 191
0593_C06_fm Page 172 Monday, May 6, 2002 2:28 PM
172 Dynamics of Mechanical Systems
FIGURE 6.5.3 FIGURE 6.5.4
An extensible (elastic) rod. An elastic rod subjected to different but equivalent force systems.
FIGURE 6.5.5 FIGURE 6.5.6
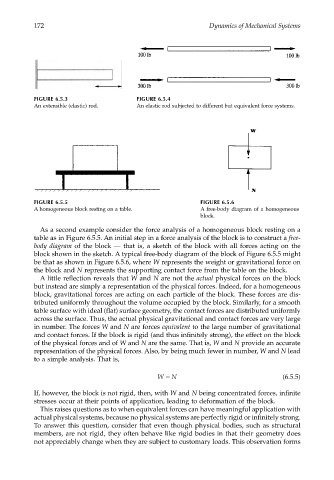
A homogeneous block resting on a table. A free-body diagram of a homogeneous
block.
As a second example consider the force analysis of a homogeneous block resting on a
table as in Figure 6.5.5. An initial step in a force analysis of the block is to construct a free-
body diagram of the block — that is, a sketch of the block with all forces acting on the
block shown in the sketch. A typical free-body diagram of the block of Figure 6.5.5 might
be that as shown in Figure 6.5.6, where W represents the weight or gravitational force on
the block and N represents the supporting contact force from the table on the block.
A little reflection reveals that W and N are not the actual physical forces on the block
but instead are simply a representation of the physical forces. Indeed, for a homogeneous
block, gravitational forces are acting on each particle of the block. These forces are dis-
tributed uniformly throughout the volume occupied by the block. Similarly, for a smooth
table surface with ideal (flat) surface geometry, the contact forces are distributed uniformly
across the surface. Thus, the actual physical gravitational and contact forces are very large
in number. The forces W and N are forces equivalent to the large number of gravitational
and contact forces. If the block is rigid (and thus infinitely strong), the effect on the block
of the physical forces and of W and N are the same. That is, W and N provide an accurate
representation of the physical forces. Also, by being much fewer in number, W and N lead
to a simple analysis. That is,
W = N (6.5.5)
If, however, the block is not rigid, then, with W and N being concentrated forces, infinite
stresses occur at their points of application, leading to deformation of the block.
This raises questions as to when equivalent forces can have meaningful application with
actual physical systems, because no physical systems are perfectly rigid or infinitely strong.
To answer this question, consider that even though physical bodies, such as structural
members, are not rigid, they often behave like rigid bodies in that their geometry does
not appreciably change when they are subject to customary loads. This observation forms