
Page 212 - Dynamics of Mechanical Systems
P. 212
0593_C06_fm Page 193 Monday, May 6, 2002 2:28 PM
Forces and Force Systems 193
P6.5.2: Repeat Problem P6.5.1 with the single force F passing through G. Compare the
magnitudes of the respective couple torques.
P6.5.3: Consider a homogeneous rectangular block with dimensions a, b, and c as repre-
sented in Figure P6.5.3. Let the gravitational forces acting on the block be replaced by an
equivalent force system consisting of a single force W. If ρ is the uniform mass density of
the block, find the magnitude and line of action of W.
n
3
a O
n
2
c
b
FIGURE P6.5.3 n
A homogeneous rectangular block. 1
P6.5.4: See Problem P6.5.3. Suppose the gravitational force system on the block is replaced
by an equivalent force system consisting of a single force W passing through O together
with a couple with torque T. Find F and T. Express the results in terms of the unit vectors
n , n , and n shown in Figure P6.5.3.
3
2
1
6.6 Wrenches
P6.6.1: See Problems P6.5.1 and P6.3.1. For the force system of Problems P6.5.1 and P6.3.1,
*
find the point Q for which there is a minimum moment of the force system. Specifically,
*
*
find the position vector OQ locating Q relative to O. Express the result in terms of the
unit vectors n , n , and n shown in Figure P6.5.1.
3
2
1
P6.6.2: See Problem P6.6.1. Find a wrench that is equivalent to the force system of Problems
P6.3.1, P6.5.1, and P6.6.1. Express the results in terms of the unit vectors of Figure P6.5.1.
6.7 Physical Forces: Applied (Active) Forces
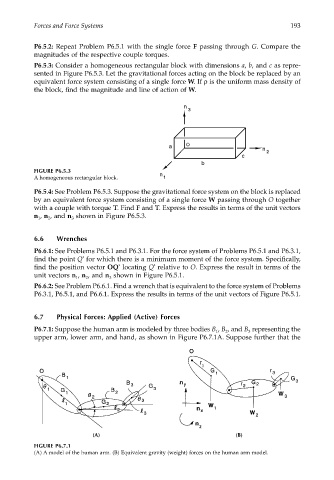
P6.7.1: Suppose the human arm is modeled by three bodies B , B , and B representing the
2
3
1
upper arm, lower arm, and hand, as shown in Figure P6.7.1A. Suppose further that the
(A) (B)
FIGURE P6.7.1
(A) A model of the human arm. (B) Equivalent gravity (weight) forces on the human arm model.