
Page 432 - Dynamics of Mechanical Systems
P. 432
0593_C11_fm Page 413 Monday, May 6, 2002 2:59 PM
Generalized Dynamics: Kinematics and Kinetics 413
β
1
β
2
β
3
P(M)
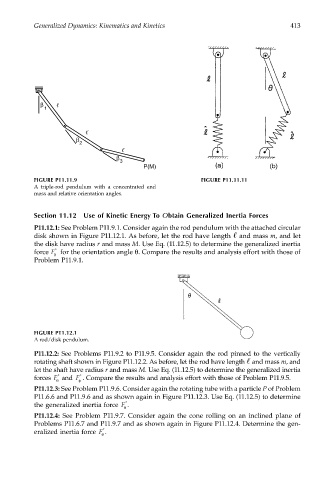
FIGURE P11.11.9 FIGURE P11.11.11
A triple-rod pendulum with a concentrated end
mass and relative orientation angles.
Section 11.12 Use of Kinetic Energy To Obtain Generalized Inertia Forces
P11.12.1: See Problem P11.9.1. Consider again the rod pendulum with the attached circular
disk shown in Figure P11.12.1. As before, let the rod have length and mass m, and let
the disk have radius r and mass M. Use Eq. (11.12.5) to determine the generalized inertia
force F θ * for the orientation angle θ. Compare the results and analysis effort with those of
Problem P11.9.1.
FIGURE P11.12.1
A rod/disk pendulum.
P11.12.2: See Problems P11.9.2 to P11.9.5. Consider again the rod pinned to the vertically
rotating shaft shown in Figure P11.12.2. As before, let the rod have length and mass m, and
let the shaft have radius r and mass M. Use Eq. (11.12.5) to determine the generalized inertia
forces F θ * and F φ * . Compare the results and analysis effort with those of Problem P11.9.5.
P11.12.3: See Problem P11.9.6. Consider again the rotating tube with a particle P of Problem
P11.6.6 and P11.9.6 and as shown again in Figure P11.12.3. Use Eq. (11.12.5) to determine
the generalized inertia force F θ * .
P11.12.4: See Problem P11.9.7. Consider again the cone rolling on an inclined plane of
Problems P11.6.7 and P11.9.7 and as shown again in Figure P11.12.4. Determine the gen-
eralized inertia force F θ * .