
Page 427 - Dynamics of Mechanical Systems
P. 427
0593_C11_fm Page 408 Monday, May 6, 2002 2:59 PM
408 Dynamics of Mechanical Systems
θ
ˆ ˆ
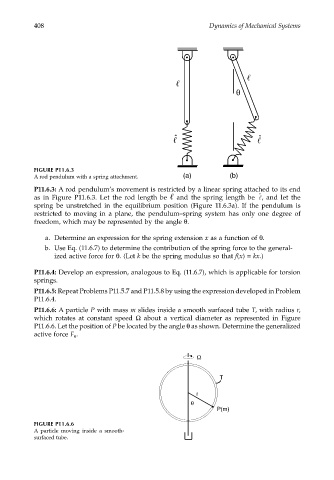
FIGURE P11.6.3
A rod pendulum with a spring attachment. (a) (b)
P11.6.3: A rod pendulum’s movement is restricted by a linear spring attached to its end
ˆ
l
as in Figure P11.6.3. Let the rod length be and the spring length be , and let the
spring be unstretched in the equilibrium position (Figure 11.6.3a). If the pendulum is
restricted to moving in a plane, the pendulum–spring system has only one degree of
freedom, which may be represented by the angle θ.
a. Determine an expression for the spring extension x as a function of θ.
b. Use Eq. (11.6.7) to determine the contribution of the spring force to the general-
ized active force for θ. (Let k be the spring modulus so that f(x) = kx.)
P11.6.4: Develop an expression, analogous to Eq. (11.6.7), which is applicable for torsion
springs.
P11.6.5: Repeat Problems P11.5.7 and P11.5.8 by using the expression developed in Problem
P11.6.4.
P11.6.6: A particle P with mass m slides inside a smooth surfaced tube T, with radius r,
which rotates at constant speed Ω about a vertical diameter as represented in Figure
P11.6.6. Let the position of P be located by the angle θ as shown. Determine the generalized
active force F .
θ
Ω
T
r
θ
P(m)
FIGURE P11.6.6
A particle moving inside a smooth-
surfaced tube.