
Page 422 - Dynamics of Mechanical Systems
P. 422
0593_C11_fm Page 403 Monday, May 6, 2002 2:59 PM
Generalized Dynamics: Kinematics and Kinetics 403
Section 11.4 Vector Functions, Partial Velocity, and Partial Angular Velocity
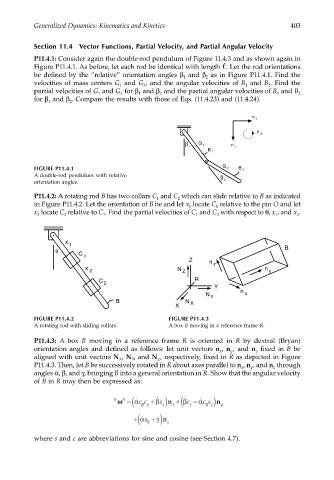
P11.4.1: Consider again the double-rod pendulum of Figure 11.4.3 and as shown again in
Figure P11.4.1. As before, let each rod be identical with length . Let the rod orientations
be defined by the “relative” orientation angles β and β as in Figure P11.4.1. Find the
1
2
velocities of mass centers G and G , and the angular velocities of B and B . Find the
1
2
2
1
partial velocities of G and G for β and β and the partial angular velocities of B and B 2
2
1
2
1
1
for β and β . Compare the results with those of Eqs. (11.4.23) and (11.4.24).
1
2
n 2
n
3
β G 1 n
1 1
B 1
FIGURE P11.4.1 G 2 B 2
A double-rod pendulum with relative β
orientation angles. 2
P11.4.2: A rotating rod B has two collars C and C which can slide relative to B as indicated
1 2
in Figure P11.4.2. Let the orientation of B be and let x locate C relative to the pin O and let
1 1
x locate C relative to C . Find the partial velocities of C and C with respect to θ, x , and x .
2 2 1 1 2 1 2
x
1
θ B
C
1
Z n
z
x N n
2 Z y
C 2 R
Y
n
N x
Y
B N X
X
FIGURE P11.4.2 FIGURE P11.4.3
A rotating rod with sliding collars. A box B moving in a reference frame R.
P11.4.3: A box B moving in a reference frame R is oriented in R by dextral (Bryan)
orientation angles and defined as follows: let unit vectors n , n , and n fixed in B be
y
z
x
aligned with unit vectors N , N , and N , respectively, fixed in R as depicted in Figure
X
Z
Y
P11.4.3. Then, let B be successively rotated in R about axes parallel to n , n , and n through
y
x
z
angles α, β, and γ, bringing B into a general orientation in R. Show that the angular velocity
of B in R may then be expressed as:
(
(
B
R ωω= ˙ α cc + β ˙ s n x ) + β ˙ c − ˙ α c s n y )
γ
β γ
γ
β γ
+( α ˙ s + ˙ z ) γ n
β
where s and c are abbreviations for sine and cosine (see Section 4.7).