
Page 421 - Dynamics of Mechanical Systems
P. 421
0593_C11_fm Page 402 Monday, May 6, 2002 2:59 PM
402 Dynamics of Mechanical Systems
11.3. Kane, T. R., Analytical Elements of Mechanics, Vol. 1, Academic Press, New York, 1959, p. 128.
11.4. Huston, R. L., and Passerello, C. E., Another look at nonholonomic systems, J. Appl. Mech., 40,
101–104, 1973.
11.5. Huston, R. L., Multibody Dynamics, Butterworth-Heinemann, Stoneham, MA, 1990.
11.6 Huston, R. L., and Liu, C. Q., Formulas for Dynamic Analysis, Marcel Dekker, New York, 2001.
Problems
Section 11.2 Coordinates, Constraints, and Degrees of Freedom
P11.2.1: Determine the number of degrees of freedom of the following systems:
a. Pair of eyeglasses
b. Pair of pliers or pair of scissors
c. Child’s tricycle rolling on a flat horizontal surface (let the tricycle be modeled
by a frame, two rear wheels, and a front steering wheel)
d. Human arm model consisting of three rigid bodies representing the upper arm,
the lower arm, and the hand (with spherical joints at the wrist and shoulder and
a hinge joint at the elbow)
e. Pencil writing on a sheet of paper
f. Eraser, erasing a chalk board
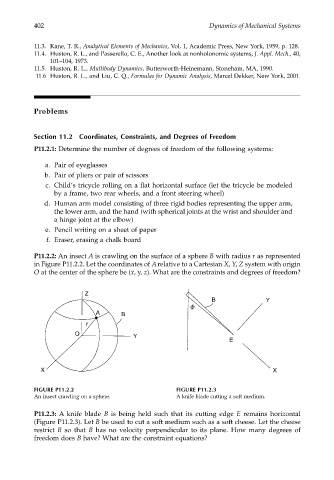
P11.2.2: An insect A is crawling on the surface of a sphere B with radius r as represented
in Figure P11.2.2. Let the coordinates of A relative to a Cartesian X, Y, Z system with origin
O at the center of the sphere be (x, y, z). What are the constraints and degrees of freedom?
FIGURE P11.2.2 FIGURE P11.2.3
An insect crawling on a sphere. A knife blade cutting a soft medium.
P11.2.3: A knife blade B is being held such that its cutting edge E remains horizontal
(Figure P11.2.3). Let B be used to cut a soft medium such as a soft cheese. Let the cheese
restrict B so that B has no velocity perpendicular to its plane. How many degrees of
freedom does B have? What are the constraint equations?