
Page 275 - Flexible Robotics in Medicine
P. 275
264 Chapter 11
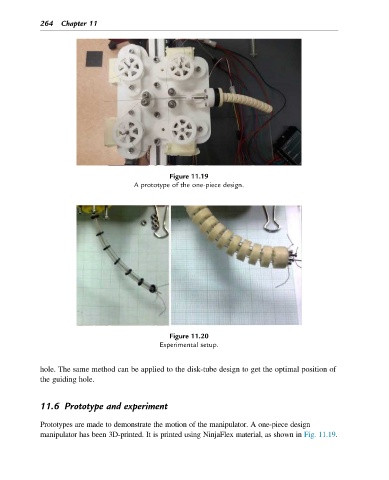
Figure 11.19
A prototype of the one-piece design.
Figure 11.20
Experimental setup.
hole. The same method can be applied to the disk-tube design to get the optimal position of
the guiding hole.
11.6 Prototype and experiment
Prototypes are made to demonstrate the motion of the manipulator. A one-piece design
manipulator has been 3D-printed. It is printed using NinjaFlex material, as shown in Fig. 11.19.