
Page 303 - Flexible Robotics in Medicine
P. 303
Design evolution of a flexible robotic bending end-effector for transluminal explorations 293
(A) Main conduit (B) Connector ring
(C) Nasopharyngoscope assembly
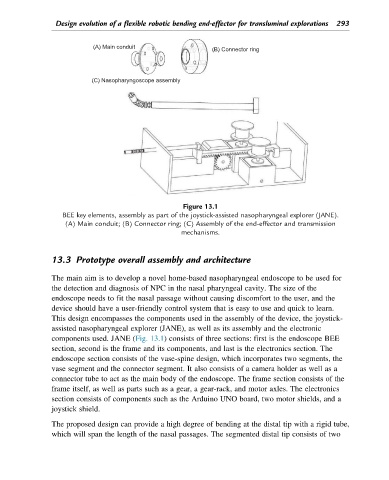
Figure 13.1
BEE key elements, assembly as part of the joystick-assisted nasopharyngeal explorer (JANE).
(A) Main conduit; (B) Connector ring; (C) Assembly of the end-effector and transmission
mechanisms.
13.3 Prototype overall assembly and architecture
The main aim is to develop a novel home-based nasopharyngeal endoscope to be used for
the detection and diagnosis of NPC in the nasal pharyngeal cavity. The size of the
endoscope needs to fit the nasal passage without causing discomfort to the user, and the
device should have a user-friendly control system that is easy to use and quick to learn.
This design encompasses the components used in the assembly of the device, the joystick-
assisted nasopharyngeal explorer (JANE), as well as its assembly and the electronic
components used. JANE (Fig. 13.1) consists of three sections: first is the endoscope BEE
section, second is the frame and its components, and last is the electronics section. The
endoscope section consists of the vase-spine design, which incorporates two segments, the
vase segment and the connector segment. It also consists of a camera holder as well as a
connector tube to act as the main body of the endoscope. The frame section consists of the
frame itself, as well as parts such as a gear, a gear-rack, and motor axles. The electronics
section consists of components such as the Arduino UNO board, two motor shields, and a
joystick shield.
The proposed design can provide a high degree of bending at the distal tip with a rigid tube,
which will span the length of the nasal passages. The segmented distal tip consists of two