
Page 319 - Flexible Robotics in Medicine
P. 319
Design evolution of a flexible robotic bending end-effector for transluminal explorations 309
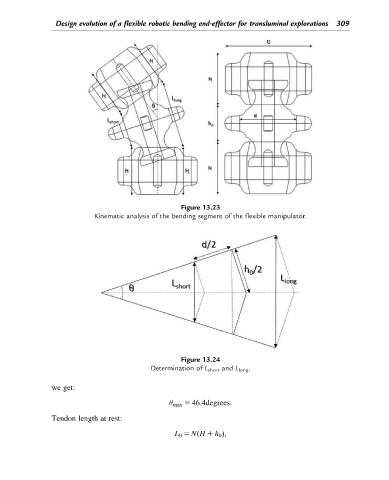
Figure 13.23
Kinematic analysis of the bending segment of the flexible manipulator.
Figure 13.24
Determination of L short and L long .
we get:
θ max 5 46:4degrees:
Tendon length at rest:
L 0 5 NH 1 h 0 Þ;
ð