
Page 314 - Flexible Robotics in Medicine
P. 314
304 Chapter 13
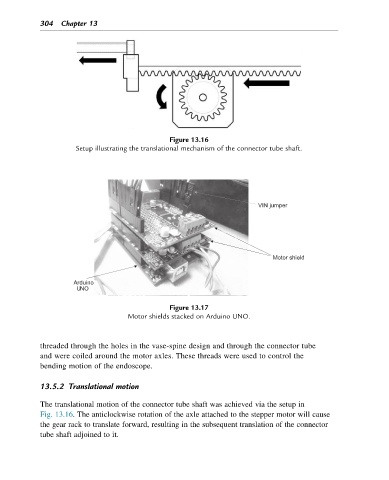
Figure 13.16
Setup illustrating the translational mechanism of the connector tube shaft.
VIN jumper
Motor shield
Arduino
UNO
Figure 13.17
Motor shields stacked on Arduino UNO.
threaded through the holes in the vase-spine design and through the connector tube
and were coiled around the motor axles. These threads were used to control the
bending motion of the endoscope.
13.5.2 Translational motion
The translational motion of the connector tube shaft was achieved via the setup in
Fig. 13.16. The anticlockwise rotation of the axle attached to the stepper motor will cause
the gear rack to translate forward, resulting in the subsequent translation of the connector
tube shaft adjoined to it.