
Page 319 - Fundamentals of Radar Signal Processing
P. 319
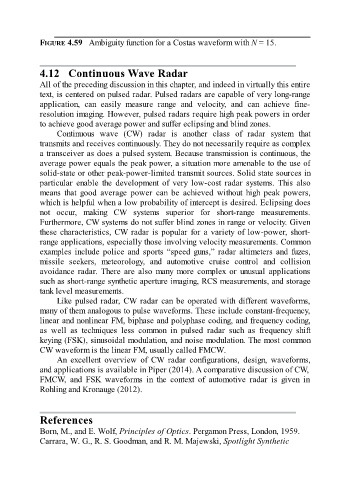
FIGURE 4.59 Ambiguity function for a Costas waveform with N = 15.
4.12 Continuous Wave Radar
All of the preceding discussion in this chapter, and indeed in virtually this entire
text, is centered on pulsed radar. Pulsed radars are capable of very long-range
application, can easily measure range and velocity, and can achieve fine-
resolution imaging. However, pulsed radars require high peak powers in order
to achieve good average power and suffer eclipsing and blind zones.
Continuous wave (CW) radar is another class of radar system that
transmits and receives continuously. They do not necessarily require as complex
a transceiver as does a pulsed system. Because transmission is continuous, the
average power equals the peak power, a situation more amenable to the use of
solid-state or other peak-power-limited transmit sources. Solid state sources in
particular enable the development of very low-cost radar systems. This also
means that good average power can be achieved without high peak powers,
which is helpful when a low probability of intercept is desired. Eclipsing does
not occur, making CW systems superior for short-range measurements.
Furthermore, CW systems do not suffer blind zones in range or velocity. Given
these characteristics, CW radar is popular for a variety of low-power, short-
range applications, especially those involving velocity measurements. Common
examples include police and sports “speed guns,” radar altimeters and fuzes,
missile seekers, meteorology, and automotive cruise control and collision
avoidance radar. There are also many more complex or unusual applications
such as short-range synthetic aperture imaging, RCS measurements, and storage
tank level measurements.
Like pulsed radar, CW radar can be operated with different waveforms,
many of them analogous to pulse waveforms. These include constant-frequency,
linear and nonlinear FM, biphase and polyphase coding, and frequency coding,
as well as techniques less common in pulsed radar such as frequency shift
keying (FSK), sinusoidal modulation, and noise modulation. The most common
CW waveform is the linear FM, usually called FMCW.
An excellent overview of CW radar configurations, design, waveforms,
and applications is available in Piper (2014). A comparative discussion of CW,
FMCW, and FSK waveforms in the context of automotive radar is given in
Rohling and Kronauge (2012).
References
Born, M., and E. Wolf, Principles of Optics. Pergamon Press, London, 1959.
Carrara, W. G., R. S. Goodman, and R. M. Majewski, Spotlight Synthetic