
Page 41 - Fundamentals of Radar Signal Processing
P. 41
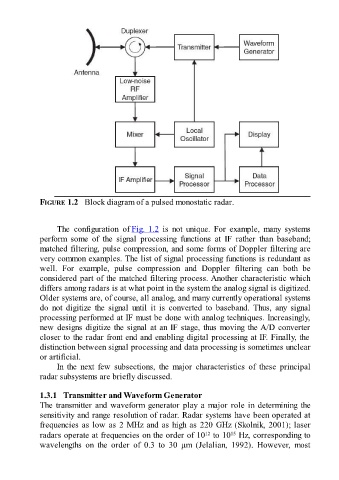
FIGURE 1.2 Block diagram of a pulsed monostatic radar.
The configuration of Fig. 1.2 is not unique. For example, many systems
perform some of the signal processing functions at IF rather than baseband;
matched filtering, pulse compression, and some forms of Doppler filtering are
very common examples. The list of signal processing functions is redundant as
well. For example, pulse compression and Doppler filtering can both be
considered part of the matched filtering process. Another characteristic which
differs among radars is at what point in the system the analog signal is digitized.
Older systems are, of course, all analog, and many currently operational systems
do not digitize the signal until it is converted to baseband. Thus, any signal
processing performed at IF must be done with analog techniques. Increasingly,
new designs digitize the signal at an IF stage, thus moving the A/D converter
closer to the radar front end and enabling digital processing at IF. Finally, the
distinction between signal processing and data processing is sometimes unclear
or artificial.
In the next few subsections, the major characteristics of these principal
radar subsystems are briefly discussed.
1.3.1 Transmitter and Waveform Generator
The transmitter and waveform generator play a major role in determining the
sensitivity and range resolution of radar. Radar systems have been operated at
frequencies as low as 2 MHz and as high as 220 GHz (Skolnik, 2001); laser
12
15
radars operate at frequencies on the order of 10 to 10 Hz, corresponding to
wavelengths on the order of 0.3 to 30 μm (Jelalian, 1992). However, most