
Page 77 - Hacking Roomba
P. 77
58 Part I — Interfacing
Besides baud rate, turning off hardware and software handshaking is the most critical setting for
serial-based projects. Handshaking (signals that indicate when it’s okay to send data) is rarely
used. Unless explicitly mentioned, assume no handshaking when configuring a serial port.
Mac OS X
On Mac OS X, the otherwise wonderful built-in Terminal.app cannot speak to serial ports,
but ZTerm can, and it is the preferred terminal program. It’s free and available from
http://homepage.mac.com/dalverson/zterm/.
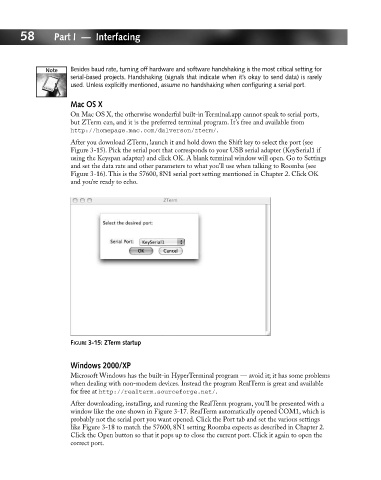
After you download ZTerm, launch it and hold down the Shift key to select the port (see
Figure 3-15). Pick the serial port that corresponds to your USB serial adapter (KeySerial1 if
using the Keyspan adapter) and click OK. A blank terminal window will open. Go to Settings
and set the data rate and other parameters to what you’ll use when talking to Roomba (see
Figure 3-16). This is the 57600, 8N1 serial port setting mentioned in Chapter 2. Click OK
and you’re ready to echo.
FIGURE 3-15: ZTerm startup
Windows 2000/XP
Microsoft Windows has the built-in HyperTerminal program — avoid it; it has some problems
when dealing with non-modem devices. Instead the program RealTerm is great and available
for free at http://realterm.sourceforge.net/.
After downloading, installing, and running the RealTerm program, you’ll be presented with a
window like the one shown in Figure 3-17. RealTerm automatically opened COM1, which is
probably not the serial port you want opened. Click the Port tab and set the various settings
like Figure 3-18 to match the 57600, 8N1 setting Roomba expects as described in Chapter 2.
Click the Open button so that it pops up to close the current port. Click it again to open the
correct port.