
Page 89 - Hacking Roomba
P. 89
70 Part I — Interfacing
The Circuit
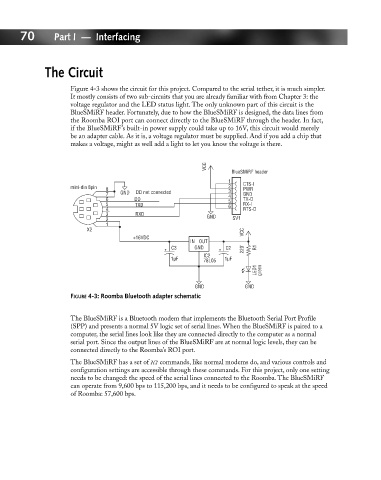
Figure 4-3 shows the circuit for this project. Compared to the serial tether, it is much simpler.
It mostly consists of two sub-circuits that you are already familiar with from Chapter 3: the
voltage regulator and the LED status light. The only unknown part of this circuit is the
BlueSMiRF header. Fortunately, due to how the BlueSMiRF is designed, the data lines from
the Roomba ROI port can connect directly to the BlueSMiRF through the header. In fact,
if the BlueSMiRF’s built-in power supply could take up to 16V, this circuit would merely
be an adapter cable. As it is, a voltage regulator must be supplied. And if you add a chip that
makes a voltage, might as well add a light to let you know the voltage is there.
VCC
BlueSMiRF header
1 CTS-I
mini-din 8pin 8 2 PWR
7 GND DD not connected 3 GND
4
6 DD 5 TX-O
5 TXD 6 RX-I
4 RTS-O
3 RXD GND
2 SV1
1
X2 VCC
+16VDC
IN OUT
C3 GND C2 220' R1
IC2
1µF 78L05 1µF
LED1 green
GND GND
FIGURE 4-3: Roomba Bluetooth adapter schematic
The BlueSMiRF is a Bluetooth modem that implements the Bluetooth Serial Port Profile
(SPP) and presents a normal 5V logic set of serial lines. When the BlueSMiRF is paired to a
computer, the serial lines look like they are connected directly to the computer as a normal
serial port. Since the output lines of the BlueSMiRF are at normal logic levels, they can be
connected directly to the Roomba’s ROI port.
The BlueSMiRF has a set of AT commands, like normal modems do, and various controls and
configuration settings are accessible through these commands. For this project, only one setting
needs to be changed: the speed of the serial lines connected to the Roomba. The BlueSMiRF
can operate from 9,600 bps to 115,200 bps, and it needs to be configured to speak at the speed
of Roomba: 57,600 bps.