
Page 179 - Human Inspired Dexterity in Robotic Manipulation
P. 179
A Grasping and Manipulation Scheme 177
0.2
x d
Object position x (m) 0.1 0 x pre
x new
–0.1
0 2 4 6 8 10
Time (s)
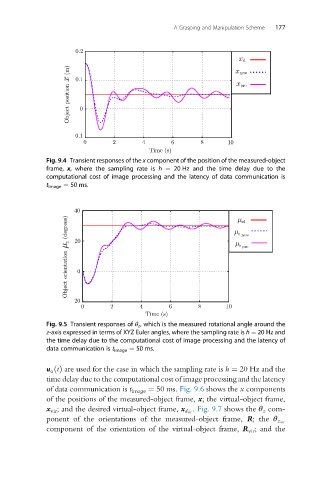
Fig. 9.4 Transient responses of the x component of the position of the measured-object
frame, x, where the sampling rate is h ¼ 20 Hz and the time delay due to the
computational cost of image processing and the latency of data communication is
t image ¼ 50 ms.
40 µ z new
Object orientation µ z (degrees) 20 0 µ z pre
µ zd
–20
0 2 4 6 8 10
Time (s)
Fig. 9.5 Transient responses of θ z , which is the measured rotational angle around the
z-axis expressed in terms of XYZ Euler angles, where the sampling rate is h ¼ 20 Hz and
the time delay due to the computational cost of image processing and the latency of
data communication is t image ¼ 50 ms.
u o tðÞ are used for the case in which the sampling rate is h ¼ 20 Hz and the
time delay due to the computational cost of image processing and the latency
of data communication is t image ¼ 50 ms. Fig. 9.6 shows the x components
of the positions of the measured-object frame, x; the virtual-object frame,
. Fig. 9.7 shows the θ z com-
x vir ; and the desired virtual-object frame, x d vir
ponent of the orientations of the measured-object frame, R; the θ z vir
component of the orientation of the virtual-object frame, R vir ; and the