
Page 181 - Human Inspired Dexterity in Robotic Manipulation
P. 181
A Grasping and Manipulation Scheme 179
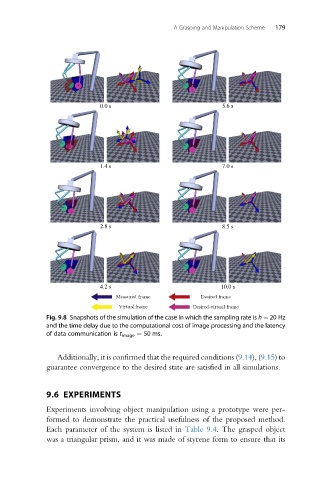
Fig. 9.8 Snapshots of the simulation of the case in which the sampling rate is h ¼ 20 Hz
and the time delay due to the computational cost of image processing and the latency
of data communication is t image ¼ 50 ms.
Additionally, it is confirmed that the required conditions (9.14), (9.15)to
guarantee convergence to the desired state are satisfied in all simulations.
9.6 EXPERIMENTS
Experiments involving object manipulation using a prototype were per-
formed to demonstrate the practical usefulness of the proposed method.
Each parameter of the system is listed in Table 9.4. The grasped object
was a triangular prism, and it was made of styrene form to ensure that its