
Page 346 - Introduction to AI Robotics
P. 346
9.3 Relational Methods
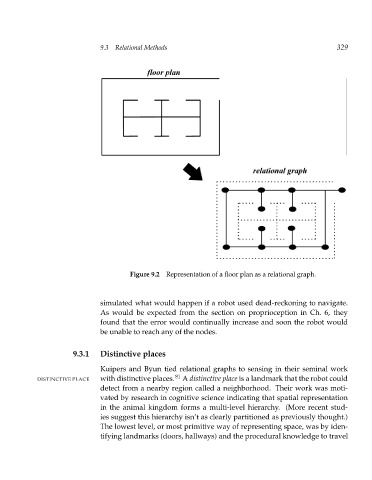
Figure 9.2 Representation of a floor plan as a relational graph. 329
simulated what would happen if a robot used dead-reckoning to navigate.
As would be expected from the section on proprioception in Ch. 6, they
found that the error would continually increase and soon the robot would
be unable to reach any of the nodes.
9.3.1 Distinctive places
Kuipers and Byun tied relational graphs to sensing in their seminal work
DISTINCTIVE PLACE with distinctive places. 81 A distinctive place is a landmark that the robot could
detect from a nearby region called a neighborhood. Their work was moti-
vated by research in cognitive science indicating that spatial representation
in the animal kingdom forms a multi-level hierarchy. (More recent stud-
ies suggest this hierarchy isn’t as clearly partitioned as previously thought.)
The lowest level, or most primitive way of representing space, was by iden-
tifying landmarks (doors, hallways) and the procedural knowledge to travel