
Page 349 - Introduction to AI Robotics
P. 349
332
neighborhood 9 Topological Path Planning
boundary distinctive
place (within
the corner)
path of robot as it moves
into neighborhood and
to the distinctive place
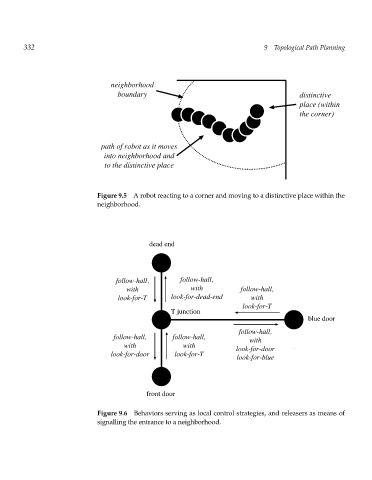
Figure 9.5 A robot reacting to a corner and moving to a distinctive place within the
neighborhood.
dead end
follow-hall, follow-hall,
with with follow-hall,
look-for-T look-for-dead-end with
look-for-T
T junction
blue door
follow-hall,
follow-hall, follow-hall,
with
with with look-for-door
look-for-door look-for-T
look-for-blue
front door
Figure 9.6 Behaviors serving as local control strategies, and releasers as means of
signalling the entrance to a neighborhood.