
Page 419 - Introduction to AI Robotics
P. 419
402
11
reading 1 reading 2 Localization and Map Making
00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0
00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0
00 0 0 0 30 0 0 0 30 0 0 0 60 0 0 0
00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0
00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0
reading 3 reading 4
00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0
00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0
60 0 0 0 66 0 0 0 66 0 0 0 612 0 0 0
00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0
00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0
reading 5 reading 6
00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0
00 0 0 0 12 00 00 12 00 00 1215 0 0 0
612 0 0 0 512 0 0 0 512 0 0 0 511 0 0 0
00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0
00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0
reading 7 reading 8
00 0 0 0 00 0 0 0 00 0 0 0 00 15 0 0
1215 0 0 0 1215 15 0 0 1215 15 0 0 1215 14 0 0
511 0 0 0 511 0 0 0 511 0 0 0 511 0 0 0
00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0
00 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0
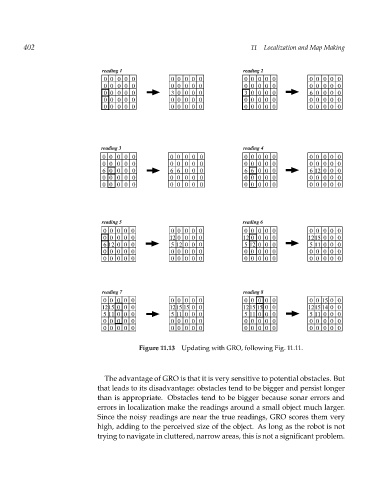
Figure 11.13 Updating with GRO, following Fig. 11.11.
The advantage of GRO is that it is very sensitive to potential obstacles. But
that leads to its disadvantage: obstacles tend to be bigger and persist longer
than is appropriate. Obstacles tend to be bigger because sonar errors and
errors in localization make the readings around a small object much larger.
Since the noisy readings are near the true readings, GRO scores them very
high, adding to the perceived size of the object. As long as the robot is not
trying to navigate in cluttered, narrow areas, this is not a significant problem.