
Page 421 - Introduction to AI Robotics
P. 421
404
b.
a. 11 Localization and Map Making
c.
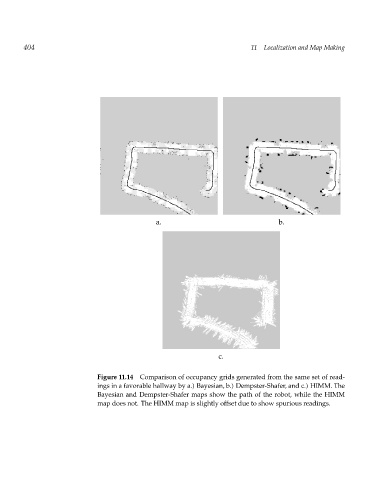
Figure 11.14 Comparison of occupancy grids generated from the same set of read-
ings in a favorable hallway by a.) Bayesian, b.) Dempster-Shafer, and c.) HIMM. The
Bayesian and Dempster-Shafer maps show the path of the robot, while the HIMM
map does not. The HIMM map is slightly offset due to show spurious readings.