
Page 127 - Introduction to Autonomous Mobile Robots
P. 127
112
D Chapter 4
Laser / Collimated beam
P
L Target
x Transmitted Beam
Reflected Beam
Lens
L
Position-Sensitive Device (PSD) D = f ---
or Linear Camera x
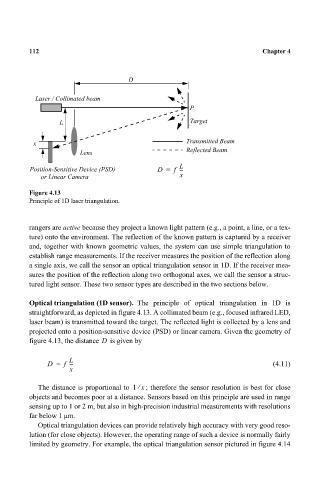
Figure 4.13
Principle of 1D laser triangulation.
rangers are active because they project a known light pattern (e.g., a point, a line, or a tex-
ture) onto the environment. The reflection of the known pattern is captured by a receiver
and, together with known geometric values, the system can use simple triangulation to
establish range measurements. If the receiver measures the position of the reflection along
a single axis, we call the sensor an optical triangulation sensor in 1D. If the receiver mea-
sures the position of the reflection along two orthogonal axes, we call the sensor a struc-
tured light sensor. These two sensor types are described in the two sections below.
Optical triangulation (1D sensor). The principle of optical triangulation in 1D is
straightforward, as depicted in figure 4.13. A collimated beam (e.g., focused infrared LED,
laser beam) is transmitted toward the target. The reflected light is collected by a lens and
projected onto a position-sensitive device (PSD) or linear camera. Given the geometry of
figure 4.13, the distance D is given by
L
D = f --- (4.11)
x
The distance is proportional to 1 x ⁄ ; therefore the sensor resolution is best for close
objects and becomes poor at a distance. Sensors based on this principle are used in range
sensing up to 1 or 2 m, but also in high-precision industrial measurements with resolutions
far below 1 µm.
Optical triangulation devices can provide relatively high accuracy with very good reso-
lution (for close objects). However, the operating range of such a device is normally fairly
limited by geometry. For example, the optical triangulation sensor pictured in figure 4.14