
Page 303 - Introduction to Autonomous Mobile Robots
P. 303
288
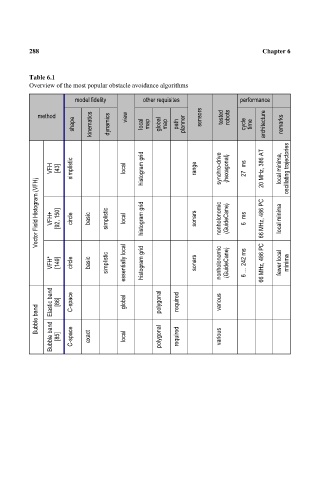
Table 6.1 Chapter 6
Overview of the most popular obstacle avoidance algorithms
model fidelity other requisites performance
method view sensors tested robots
shape kinematics dynamics local map global map path planner cycle time architecture remarks
VFH [43] simplistic local histogram grid range synchro-drive (hexagonal) ms 27 20 MHz, 386 AT local minima, oscillating trajectories
Vector Field Histogram (VFH) VFH+ [92, 150] circle basic simplistic local histogram grid sonars nonholonomic (GuideCane) 6ms 66 MHz, 486 PC local minima
VFH* [149] circle basic simplistic essentially local histogram grid sonars nonholonomic (GuideCane) 6 … 242 ms 66 MHz, 486 PC fewer local minima
Elastic band [86] C-space global polygonal required various
Bubble band
Bubble band [85] C-space exact local polygonal required various