
Page 300 - Introduction to Autonomous Mobile Robots
P. 300
Planning and Navigation
Figure 6.17 285
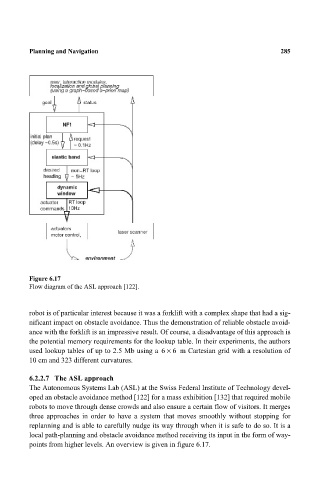
Flow diagram of the ASL approach [122].
robot is of particular interest because it was a forklift with a complex shape that had a sig-
nificant impact on obstacle avoidance. Thus the demonstration of reliable obstacle avoid-
ance with the forklift is an impressive result. Of course, a disadvantage of this approach is
the potential memory requirements for the lookup table. In their experiments, the authors
used lookup tables of up to 2.5 Mb using a 6 × 6 m Cartesian grid with a resolution of
10 cm and 323 different curvatures.
6.2.2.7 The ASL approach
The Autonomous Systems Lab (ASL) at the Swiss Federal Institute of Technology devel-
oped an obstacle avoidance method [122] for a mass exhibition [132] that required mobile
robots to move through dense crowds and also ensure a certain flow of visitors. It merges
three approaches in order to have a system that moves smoothly without stopping for
replanning and is able to carefully nudge its way through when it is safe to do so. It is a
local path-planning and obstacle avoidance method receiving its input in the form of way-
points from higher levels. An overview is given in figure 6.17.