
Page 33 - Introduction to Autonomous Mobile Robots
P. 33
18
mammals reptiles insects Chapter 2
two or four legs four legs six legs
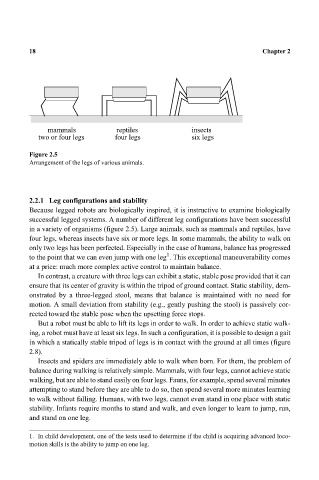
Figure 2.5
Arrangement of the legs of various animals.
2.2.1 Leg configurations and stability
Because legged robots are biologically inspired, it is instructive to examine biologically
successful legged systems. A number of different leg configurations have been successful
in a variety of organisms (figure 2.5). Large animals, such as mammals and reptiles, have
four legs, whereas insects have six or more legs. In some mammals, the ability to walk on
only two legs has been perfected. Especially in the case of humans, balance has progressed
1
to the point that we can even jump with one leg . This exceptional maneuverability comes
at a price: much more complex active control to maintain balance.
In contrast, a creature with three legs can exhibit a static, stable pose provided that it can
ensure that its center of gravity is within the tripod of ground contact. Static stability, dem-
onstrated by a three-legged stool, means that balance is maintained with no need for
motion. A small deviation from stability (e.g., gently pushing the stool) is passively cor-
rected toward the stable pose when the upsetting force stops.
But a robot must be able to lift its legs in order to walk. In order to achieve static walk-
ing, a robot must have at least six legs. In such a configuration, it is possible to design a gait
in which a statically stable tripod of legs is in contact with the ground at all times (figure
2.8).
Insects and spiders are immediately able to walk when born. For them, the problem of
balance during walking is relatively simple. Mammals, with four legs, cannot achieve static
walking, but are able to stand easily on four legs. Fauns, for example, spend several minutes
attempting to stand before they are able to do so, then spend several more minutes learning
to walk without falling. Humans, with two legs, cannot even stand in one place with static
stability. Infants require months to stand and walk, and even longer to learn to jump, run,
and stand on one leg.
1. In child development, one of the tests used to determine if the child is acquiring advanced loco-
motion skills is the ability to jump on one leg.