
Page 34 - Introduction to Autonomous Mobile Robots
P. 34
Locomotion
hip abduction angle (θ) abduction-adduction 19
θ knee flexion angle (ϕ)
lift
ϕ
ψ main drive upper thigh link
hip flexion angle (ψ)
lower thigh link
shank link
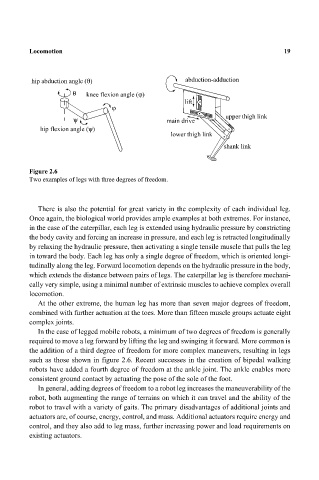
Figure 2.6
Two examples of legs with three degrees of freedom.
There is also the potential for great variety in the complexity of each individual leg.
Once again, the biological world provides ample examples at both extremes. For instance,
in the case of the caterpillar, each leg is extended using hydraulic pressure by constricting
the body cavity and forcing an increase in pressure, and each leg is retracted longitudinally
by relaxing the hydraulic pressure, then activating a single tensile muscle that pulls the leg
in toward the body. Each leg has only a single degree of freedom, which is oriented longi-
tudinally along the leg. Forward locomotion depends on the hydraulic pressure in the body,
which extends the distance between pairs of legs. The caterpillar leg is therefore mechani-
cally very simple, using a minimal number of extrinsic muscles to achieve complex overall
locomotion.
At the other extreme, the human leg has more than seven major degrees of freedom,
combined with further actuation at the toes. More than fifteen muscle groups actuate eight
complex joints.
In the case of legged mobile robots, a minimum of two degrees of freedom is generally
required to move a leg forward by lifting the leg and swinging it forward. More common is
the addition of a third degree of freedom for more complex maneuvers, resulting in legs
such as those shown in figure 2.6. Recent successes in the creation of bipedal walking
robots have added a fourth degree of freedom at the ankle joint. The ankle enables more
consistent ground contact by actuating the pose of the sole of the foot.
In general, adding degrees of freedom to a robot leg increases the maneuverability of the
robot, both augmenting the range of terrains on which it can travel and the ability of the
robot to travel with a variety of gaits. The primary disadvantages of additional joints and
actuators are, of course, energy, control, and mass. Additional actuators require energy and
control, and they also add to leg mass, further increasing power and load requirements on
existing actuators.