
Page 41 - Introduction to Autonomous Mobile Robots
P. 41
26
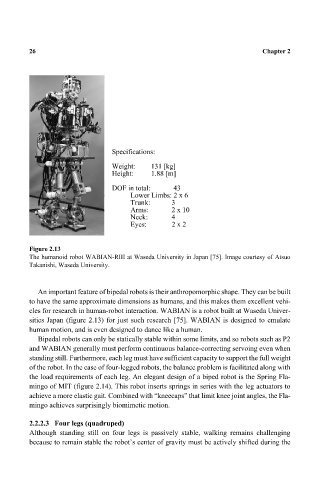
Specifications: Chapter 2
Weight: 131 [kg]
Height: 1.88 [m]
DOF in total: 43
Lower Limbs: 2 x 6
Trunk: 3
Arms: 2 x 10
Neck: 4
Eyes: 2 x 2
Figure 2.13
The humanoid robot WABIAN-RIII at Waseda University in Japan [75]. Image courtesy of Atsuo
Takanishi, Waseda University.
An important feature of bipedal robots is their anthropomorphic shape. They can be built
to have the same approximate dimensions as humans, and this makes them excellent vehi-
cles for research in human-robot interaction. WABIAN is a robot built at Waseda Univer-
sities Japan (figure 2.13) for just such research [75]. WABIAN is designed to emulate
human motion, and is even designed to dance like a human.
Bipedal robots can only be statically stable within some limits, and so robots such as P2
and WABIAN generally must perform continuous balance-correcting servoing even when
standing still. Furthermore, each leg must have sufficient capacity to support the full weight
of the robot. In the case of four-legged robots, the balance problem is facilitated along with
the load requirements of each leg. An elegant design of a biped robot is the Spring Fla-
mingo of MIT (figure 2.14). This robot inserts springs in series with the leg actuators to
achieve a more elastic gait. Combined with “kneecaps” that limit knee joint angles, the Fla-
mingo achieves surprisingly biomimetic motion.
2.2.2.3 Four legs (quadruped)
Although standing still on four legs is passively stable, walking remains challenging
because to remain stable the robot’s center of gravity must be actively shifted during the