
Page 43 - Introduction to Autonomous Mobile Robots
P. 43
Chapter 2
28
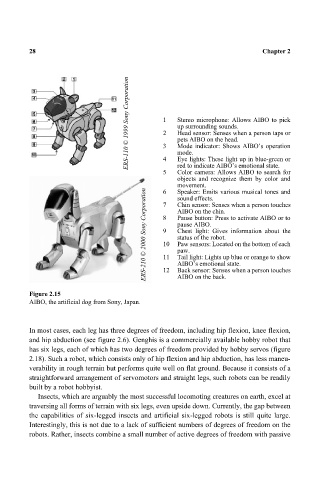
ERS-110 © 1999 Sony Corporation 1 Stereo microphone: Allows AIBO to pick
up surrounding sounds.
2
Head sensor: Senses when a person taps or
pets AIBO on the head.
Mode indicator: Shows AIBO’s operation
3
Eye lights: These light up in blue-green or
4
red to indicate AIBO’s emotional state.
5 mode.
Color camera: Allows AIBO to search for
objects and recognize them by color and
movement.
ERS-210 © 2000 Sony Corporation 8 AIBO on the chin.
Speaker: Emits various musical tones and
6
sound effects.
7
Chin sensor: Senses when a person touches
Pause button: Press to activate AIBO or to
pause AIBO.
Chest light: Gives information about the
9
status of the robot.
Paw sensors: Located on the bottom of each
10
paw.
Tail light: Lights up blue or orange to show
11
AIBO’s emotional state.
AIBO on the back.
Figure 2.15 12 Back sensor: Senses when a person touches
AIBO, the artificial dog from Sony, Japan.
In most cases, each leg has three degrees of freedom, including hip flexion, knee flexion,
and hip abduction (see figure 2.6). Genghis is a commercially available hobby robot that
has six legs, each of which has two degrees of freedom provided by hobby servos (figure
2.18). Such a robot, which consists only of hip flexion and hip abduction, has less maneu-
verability in rough terrain but performs quite well on flat ground. Because it consists of a
straightforward arrangement of servomotors and straight legs, such robots can be readily
built by a robot hobbyist.
Insects, which are arguably the most successful locomoting creatures on earth, excel at
traversing all forms of terrain with six legs, even upside down. Currently, the gap between
the capabilities of six-legged insects and artificial six-legged robots is still quite large.
Interestingly, this is not due to a lack of sufficient numbers of degrees of freedom on the
robots. Rather, insects combine a small number of active degrees of freedom with passive