
Page 40 - Introduction to Autonomous Mobile Robots
P. 40
Locomotion
Specifications: 25
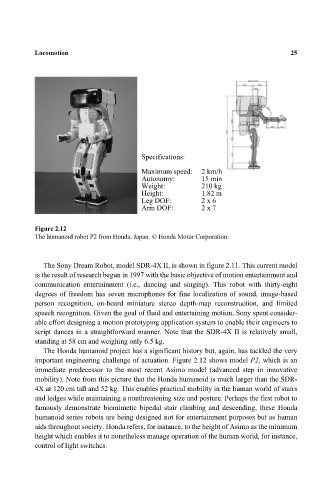
Maximum speed: 2 km/h
Autonomy: 15 min
Weight: 210 kg
Height: 1.82 m
Leg DOF: 2 x 6
Arm DOF: 2 x 7
Figure 2.12
The humanoid robot P2 from Honda, Japan. © Honda Motor Corporation.
The Sony Dream Robot, model SDR-4X II, is shown in figure 2.11. This current model
is the result of research begun in 1997 with the basic objective of motion entertainment and
communication entertainment (i.e., dancing and singing). This robot with thirty-eight
degrees of freedom has seven microphones for fine localization of sound, image-based
person recognition, on-board miniature stereo depth-map reconstruction, and limited
speech recognition. Given the goal of fluid and entertaining motion, Sony spent consider-
able effort designing a motion prototyping application system to enable their engineers to
script dances in a straightforward manner. Note that the SDR-4X II is relatively small,
standing at 58 cm and weighing only 6.5 kg.
The Honda humanoid project has a significant history but, again, has tackled the very
important engineering challenge of actuation. Figure 2.12 shows model P2, which is an
immediate predecessor to the most recent Asimo model (advanced step in innovative
mobility). Note from this picture that the Honda humanoid is much larger than the SDR-
4X at 120 cm tall and 52 kg. This enables practical mobility in the human world of stairs
and ledges while maintaining a nonthreatening size and posture. Perhaps the first robot to
famously demonstrate biomimetic bipedal stair climbing and descending, these Honda
humanoid series robots are being designed not for entertainment purposes but as human
aids throughout society. Honda refers, for instance, to the height of Asimo as the minimum
height which enables it to nonetheless manage operation of the human world, for instance,
control of light switches.