
Page 94 - Introduction to Autonomous Mobile Robots
P. 94
Mobile Robot Kinematics
Y I 79
X I
β , β s2
s1
60° β s1
-60° β s2
x, y, θ
y(t)
x(t)
θ(t)
1 2 3 4 5 t / [s]
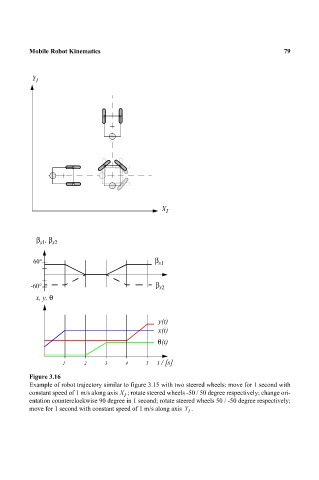
Figure 3.16
Example of robot trajectory similar to figure 3.15 with two steered wheels: move for 1 second with
constant speed of 1 m/s along axis X ; rotate steered wheels -50 / 50 degree respectively; change ori-
I
entation counterclockwise 90 degree in 1 second; rotate steered wheels 50 / -50 degree respectively;
move for 1 second with constant speed of 1 m/s along axis Y I .