
Page 96 - Introduction to Autonomous Mobile Robots
P. 96
Mobile Robot Kinematics
Y R 81
X R
v(t)
θ
ω(t)
start
goal
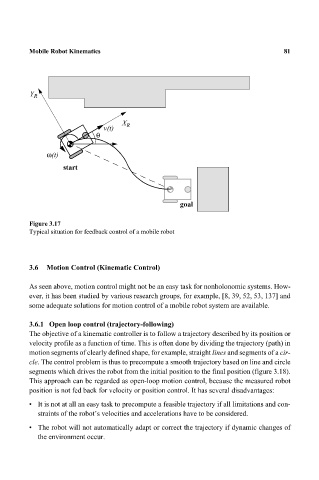
Figure 3.17
Typical situation for feedback control of a mobile robot
3.6 Motion Control (Kinematic Control)
As seen above, motion control might not be an easy task for nonholonomic systems. How-
ever, it has been studied by various research groups, for example, [8, 39, 52, 53, 137] and
some adequate solutions for motion control of a mobile robot system are available.
3.6.1 Open loop control (trajectory-following)
The objective of a kinematic controller is to follow a trajectory described by its position or
velocity profile as a function of time. This is often done by dividing the trajectory (path) in
motion segments of clearly defined shape, for example, straight lines and segments of a cir-
cle. The control problem is thus to precompute a smooth trajectory based on line and circle
segments which drives the robot from the initial position to the final position (figure 3.18).
This approach can be regarded as open-loop motion control, because the measured robot
position is not fed back for velocity or position control. It has several disadvantages:
• It is not at all an easy task to precompute a feasible trajectory if all limitations and con-
straints of the robot’s velocities and accelerations have to be considered.
• The robot will not automatically adapt or correct the trajectory if dynamic changes of
the environment occur.