
Page 333 - Introduction to Marine Engineering
P. 333
Instrumentation and control 307
Regulating
Measuring •unit
unit Motor movement
movement
input Output
potentiometer potentiometer
Balancing
Derivative
Control bridge
— o a.c, supply capacitor — o a.c. supply
bridge d
•Resistance v Resistance
Integral
capacitor
Amplifier CI
Derivative
resistance
a.c. supply
Output signal
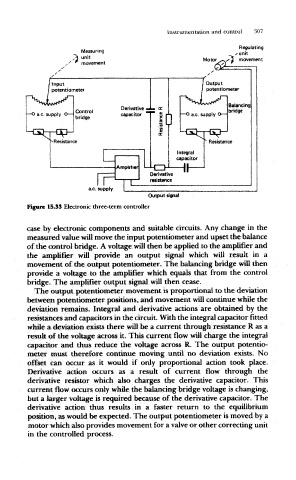
Figure 15.33 Electronic three-term controller
case by electronic components and suitable circuits. Any change in the
measured value will move the input potentiometer and upset the balance
of the control bridge. A voltage will then be applied to the amplifier and
the amplifier will provide an output signal which will result in a
movement of the output potentiometer. The balancing bridge will then
provide a voltage to the amplifier which equals that from the control
bridge. The amplifier output signal will then cease.
The output potentiometer movement is proportional to the deviation
between potentiometer positions, and movement will continue while the
deviation remains. Integral and derivative actions are obtained by the
resistances and capacitors in the circuit. With the integral capacitor fitted
while a deviation exists there will be a current through resistance R as a
result of the voltage across it. This current flow will charge the integral
capacitor and thus reduce the voltage across R. The output potentio-
meter must therefore continue moving until no deviation exists. No
offset can occur as it would if only proportional action took place.
Derivative action occurs as a result of current flow through the
derivative resistor which also charges the derivative capacitor. This
current flow occurs only while the balancing bridge voltage is changing,
but a larger voltage is required because of the derivative capacitor. The
derivative action thus results in a faster return to the equilibrium
position, as would be expected. The output potentiometer is moved by a
motor which also provides movement for a valve or other correcting unit
in the controlled process.