
Page 117 - Making PIC Microcontroller Instruments and Controllers
P. 117
couxtEEs t0t
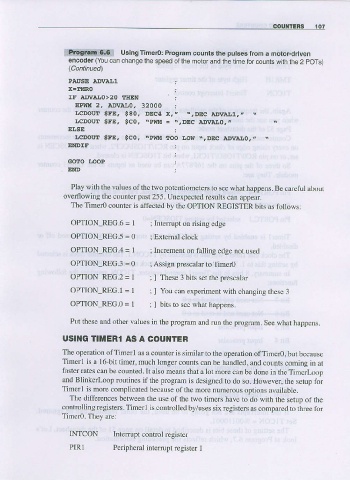
lRgx!ffij][&* ljsing Tlmero: Program counts the pulses trom a motorddven
encoder (You can change the speed olthe moior and thetime for counts wilh the 2 pOTs)
(Continued)
PAUSE .A.DVAIJI
X=EI{Ro
IF ADVAIJO>2o EIIEN
EPWM 2. ADVAIJO, 32000
LCDOUT $FE, $80, DEC4 X, "DEC jIwAl-l, " .
r,cDouT $FE. $c0. ,DEC ADVAIJO, Z
EI,SE
t cDorx! sFE, $c0, .P!t!l roo r,ow \rDEc aDvlrlo, z \
EIIDIF
GOTO LOOP
ENI)
Play with the values of the two potentiometers to see what happens. Be carcful about
overllowing the counter past 255 . Unexpected results can appear.
The Timer0 counter is affected by rhe OPTION REGISTER bits as follows:
OPIION_REG.6 = 1 ; Inrerrupr on rising edge
OPTION_REG.s = 0 ; Extemal clock
OPTION-REG4 = 1 ; Increment on falling edge not used
OPTION_REG,3 = O ; Assign prcscalar to Time
OPTION-REG.2 = I ; I These 3 bits set rhe prescalar
OPTION REG.I = 1 ; I You can experiment wirh changing these 3
=
OPTION_REG.O 1 ; I bits to see what happens.
Put these and other values in the program and run the program. Se€ what happens.
USING IIMERI AS A COUIITER
The operation ofTimeil as a counter is similar to the operation ofTimer0, but because
Timerl is a | 6-bit timer, much longer counts can be handled, and counrs coming in at
faster rates can be counted. h also means that a lot more can be done in the Timerloop
and Blinkerloop routines if the program is designed to do so. However, the setup for
Timerl is more complicated because of the more numercus oDrions available.
The differcnce. belween the use of rhe r$o timers have to do s rth lhe serup ot lhe
controlling rcgisters. Timerl is controlled by/uses six registen as compa(ed to three for
Timero. They are:
INTCON Intenupt control rcgister
PIR1 Peripheral intefiupt register I