
Page 90 - Mechanical Engineer's Data Handbook
P. 90
APPLIED MECHANICS 79
F,v (a-Phh)
Engine power P, = - Rear wheels torque T, = prmg -
?o L
D
'e
Engine torque Te = -
2nNe
T4 N
Wheel force (for 4 wheels) Fw=3 2
r Nw
Acceleration power Pa = mvi
where: a = acceleration, vi =instantaneous speed.
Transmission efficiency :
Overall efficiency qo = qcqr)tdqa
Typical values are given in the table.
~ ~ ~ ~
Clutch efficiency, qc 0.99 Wheel inertia torque Ti = la
Gearbox efficiency, qg 0.98 direct drive
0.95 low gears Deceleration d = pg
Drive shaft, joints Total braking torque (for one wheel):
and bearings, q,, 0.99
Tf
Axle efficiency, qa 0.95 T,,f=T+ Ti (front)
Overall efficiency, q, 0.90 direct drive
0.85 low gears
Tr
T,,, = + Ti (rear)
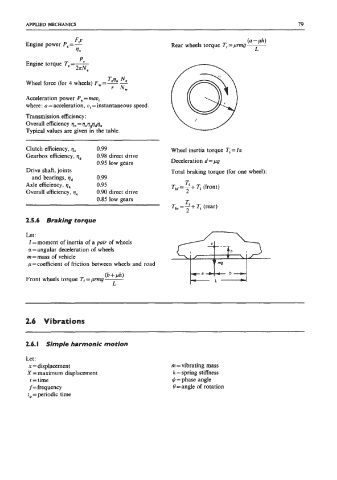
2.5.6 Braking torque
Let :
I = moment of inertia of a pair of wheels
a =angular deceleration of wheels
rn = mass of vehicle
p=coefficient of friction between wheels and road
(b + Ph)
Front wheels torque Tf=prmgL
2.6 Vibrations
2.6. I Simple harmonic motion
Let :
x =displacement rn = vibrating mass
X =maximum displacement k =spring stiffness
t = time 4 =phase angle
f = frequency 0 =angle of rotation
t, = periodic time