
Page 91 - Mechanical Engineer's Data Handbook
P. 91
80 MECHANICAL ENGINEER’S DATA HANDBOOK
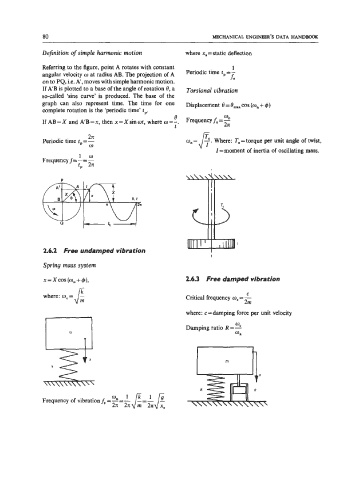
Definition of simple harmonic motion where x, = static deflection
Referring to the figure, point A rotates with constant Periodic time t, = -
1
angular velocity w at radius AB. The projection of A fn
on to PQ, i.e. A, moves with simple harmonic motion.
If AB is plotted to a base of the angle of rotation 8, a Torsional vibration
so-called ‘sine curve’ is produced. The base of the
graph can also represent time. The time for one Displacement 8 = 8,, cos (w, + 4)
complete rotation is the ‘periodic time’ t,. w
8
If AB = X and AB = x, then x = X sin wt, where w = -. Frequency fn
t 2n
2n
’
Periodic time t, = - w, = E. Where: To= torque per unit angle of twist,
0
I = moment of inertia of oscillating mass.
0
1
Frequency f= - = -
t, 2n
I
2.6.2 Free undamped vibration
I
Spring mass system
x = x cos (0, + (b), 2.6.3 Free damped vibration
C
where: w,=Jk Critical frequency 0, = -
2m
where: c = damping force per unit velocity
Damping ratio R = - 0,
On
Frequency of vibration f, =