
Page 86 - Mechanical Engineer's Data Handbook
P. 86
APPLIED MECHANICS 75
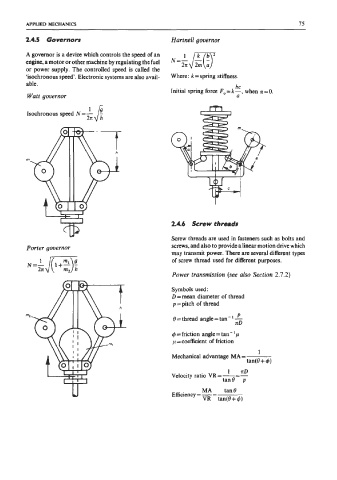
2.4.5 Governors Hartnell governor
A governor is a device which controls the speed of an .='JI"T
engine, a motor or other machine by regulating the fuel 2n 2m a
or power supply. The controlled speed is called the
'isochronous speed'. Electronic systems are also avail- Where: k = spring stiffness.
able. bc
Initial spring force F,= k--, when a=O.
Watt governor a
Isochronous speed N = -
ctb 2.4.6 Screw threads
U
Screw threads are used in fasteners such as bolts and
Porter governor screws, and also to provide a linear motion drive which
may transmit power. There are several different types
of screw thread used for different purposes.
N=L/pJ
2n
Power transmission (see also Section 2.7.2)
Symbols used:
D = mean diameter of thread
p = pitch of thread
0 =thread angle =tan-
ZD
4 =friction angle = tan- lp
p =coefficient of friction
1
Mechanical advantage MA=
tan@ + 4)
1 RD
=
Velocity ratio VR = - -
tan0 p
U Efficiency = - tan0
MA
=
VR tan@ + 4)