
Page 506 - Mechanical Engineers' Handbook (Volume 2)
P. 506
8 Simulation for Control System Analysis 497
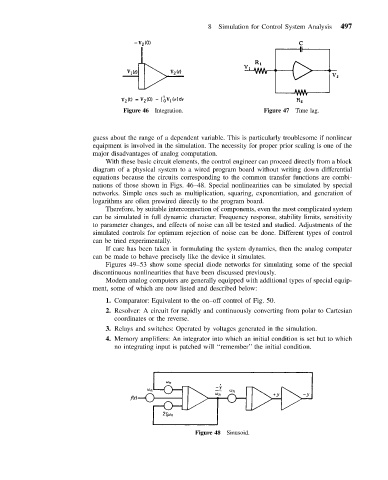
Figure 46 Integration. Figure 47 Time lag.
guess about the range of a dependent variable. This is particularly troublesome if nonlinear
equipment is involved in the simulation. The necessity for proper prior scaling is one of the
major disadvantages of analog computation.
With these basic circuit elements, the control engineer can proceed directly from a block
diagram of a physical system to a wired program board without writing down differential
equations because the circuits corresponding to the common transfer functions are combi-
nations of those shown in Figs. 46–48. Special nonlinearities can be simulated by special
networks. Simple ones such as multiplication, squaring, exponentiation, and generation of
logarithms are often prewired directly to the program board.
Therefore, by suitable interconnection of components, even the most complicated system
can be simulated in full dynamic character. Frequency response, stability limits, sensitivity
to parameter changes, and effects of noise can all be tested and studied. Adjustments of the
simulated controls for optimum rejection of noise can be done. Different types of control
can be tried experimentally.
If care has been taken in formulating the system dynamics, then the analog computer
can be made to behave precisely like the device it simulates.
Figures 49–53 show some special diode networks for simulating some of the special
discontinuous nonlinearities that have been discussed previously.
Modem analog computers are generally equipped with additional types of special equip-
ment, some of which are now listed and described below:
1. Comparator: Equivalent to the on–off control of Fig. 50.
2. Resolver: A circuit for rapidly and continuously converting from polar to Cartesian
coordinates or the reverse.
3. Relays and switches: Operated by voltages generated in the simulation.
4. Memory amplifiers: An integrator into which an initial condition is set but to which
no integrating input is patched will ‘‘remember’’ the initial condition.
Figure 48 Sinusoid.