
Page 291 - Mechanics of Microelectromechanical Systems
P. 291
278 Chapter 5
As the figure indicates, the force corresponding to the nominal
displacement/deformation can be determined from either the actuator or
spring characteristic, as also shown in Eq. (5.34).
Example 5.7
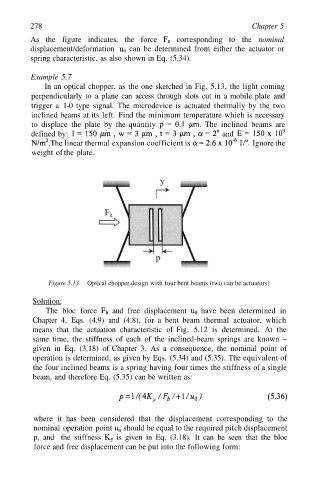
In an optical chopper, as the one sketched in Fig. 5.13, the light coming
perpendicularly to a plane can access through slots cut in a mobile plate and
trigger a 1-0 type signal. The microdevice is actuated thermally by the two
inclined beams at its left. Find the minimum temperature which is necessary
to displace the plate by the quantity The inclined beams are
defined by: and
The linear thermal expansion coefficient is Ignore the
weight of the plate.
Figure 5.13 Optical chopper design with four bent beams (two can be actuators)
Solution:
The bloc force and free displacement have been determined in
Chapter 4, Eqs. (4.9) and (4.8), for a bent beam thermal actuator, which
means that the actuation characteristic of Fig. 5.12 is determined. At the
same time, the stiffness of each of the inclined-beam springs are known –
given in Eq. (3.18) of Chapter 3. As a consequence, the nominal point of
operation is determined, as given by Eqs. (5.34) and (5.35). The equivalent of
the four inclined beams is a spring having four times the stiffness of a single
beam, and therefore Eq. (5.35) can be written as:
where it has been considered that the displacement corresponding to the
nominal operation point should be equal to the required pitch displacement
p, and the stiffness is given in Eq. (3.18). It can be seen that the bloc
force and free displacement can be put into the following form: