
Page 104 - Mechatronic Systems Modelling and Simulation with HDLs
P. 104
5.4 CO-SIMULATION BY SOFTWARE COMPILATION 93
Synchronisation Interrupt and Synchronisation
Synchronisation
Hardware simulation Hardware simulation
Hardware
Software Time
Software Software
simulation simulation
2nd attempt
clra bra .................. remaining simulation
2nd attempt,
Software replay
Invalid due
simulation
to interrupt
clra bra ..................
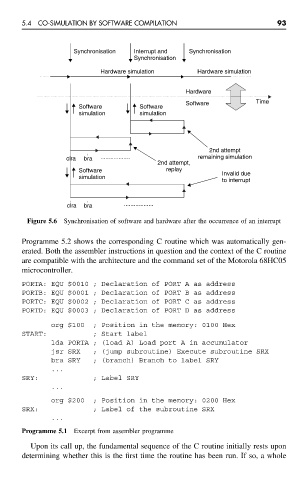
Figure 5.6 Synchronisation of software and hardware after the occurrence of an interrupt
Programme 5.2 shows the corresponding C routine which was automatically gen-
erated. Both the assembler instructions in question and the context of the C routine
are compatible with the architecture and the command set of the Motorola 68HC05
microcontroller.
PORTA: EQU $0010 ; Declaration of PORT A as address
PORTB: EQU $0001 ; Declaration of PORT B as address
PORTC: EQU $0002 ; Declaration of PORT C as address
PORTD: EQU $0003 ; Declaration of PORT D as address
org $100 ; Position in the memory: 0100 Hex
START: ; Start label
lda PORTA ; (load A) Load port A in accumulator
jsr SRX ; (jump subroutine) Execute subroutine SRX
bra SRY ; (branch) Branch to label SRY
...
SRY: ; Label SRY
...
org $200 ; Position in the memory: 0200 Hex
SRX: ; Label of the subroutine SRX
...
Programme 5.1 Excerpt from assembler programme
Upon its call up, the fundamental sequence of the C routine initially rests upon
determining whether this is the first time the routine has been run. If so, a whole