
Page 103 - Mechatronic Systems Modelling and Simulation with HDLs
P. 103
92 5 SOFTWARE IN HARDWARE DESCRIPTION LANGUAGES
Synchronisation Synchronisation Synchronisation
Hardware simulation Hardware simulation Hardware simulation
Hardware
Software Software Time
simulation
Software
simulation lda sta bra ..................
Software
Store to
simulation sta bra .................. lda main memory
Store to
I/O port Load to
clra clrx .................. sta I/O port
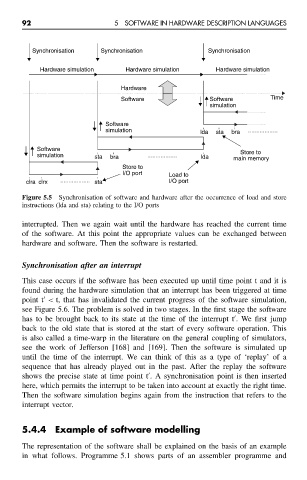
Figure 5.5 Synchronisation of software and hardware after the occurrence of load and store
instructions (lda and sta) relating to the I/O ports
interrupted. Then we again wait until the hardware has reached the current time
of the software. At this point the appropriate values can be exchanged between
hardware and software. Then the software is restarted.
Synchronisation after an interrupt
This case occurs if the software has been executed up until time point t and it is
found during the hardware simulation that an interrupt has been triggered at time
point t < t, that has invalidated the current progress of the software simulation,
see Figure 5.6. The problem is solved in two stages. In the first stage the software
has to be brought back to its state at the time of the interrupt t .Wefirst jump
back to the old state that is stored at the start of every software operation. This
is also called a time-warp in the literature on the general coupling of simulators,
see the work of Jefferson [168] and [169]. Then the software is simulated up
until the time of the interrupt. We can think of this as a type of ‘replay’ of a
sequence that has already played out in the past. After the replay the software
shows the precise state at time point t . A synchronisation point is then inserted
here, which permits the interrupt to be taken into account at exactly the right time.
Then the software simulation begins again from the instruction that refers to the
interrupt vector.
5.4.4 Example of software modelling
The representation of the software shall be explained on the basis of an example
in what follows. Programme 5.1 shows parts of an assembler programme and