
Page 106 - Mechatronics for Safety, Security and Dependability in a New Era
P. 106
Ch19-I044963.fm Page 90 Tuesday, August 1, 2006 2:54 PM
Ch19-I044963.fm
90 90 Page 90 Tuesday, August 1, 2006 2:54 PM
Evaluation of Manipulation Plans
We introduce criteria to evaluate generated qualitative manipulation plans. First, let N, be the number
of state transitions through one sequence. In this paper, we prefer a sequence including fewer
intermediate states, that is, fewer state transitions because it takes much time to finish the required
manipulation when a selected sequence includes many state transitions. Note that a
knotting/unknotting process corresponds to increase/decrease of crossings of a linear object. Recall
that operation II generates/deletes two crossings while operation I and IV generates/deletes one
crossing. Then, we find that a sequence including the more operations II consists of the fewer
intermediate states. Next, let N c be the changing times of grasping points through one sequence. When
a grasping point never change during manipulation, position and direction of a linear object at the
grasping point corresponds to those of fingertips of a manipulator obviously. So, estimation of the
object shape is not needed once the manipulator grasps the object. However, if a grasping point
changes during manipulation, position and direction of a segment to be grasped in the next operation
must be estimated in the detailed planning. Furthermore, it takes much time to change a grasping point.
Therefore, a sequence in which grasping points are not changed frequently is preferable. By
considering these criteria, we can reduce the number of candidates of qualitative manipulation plans.
EXAMPLE OF POSSIBLE PROCESS GENERATION
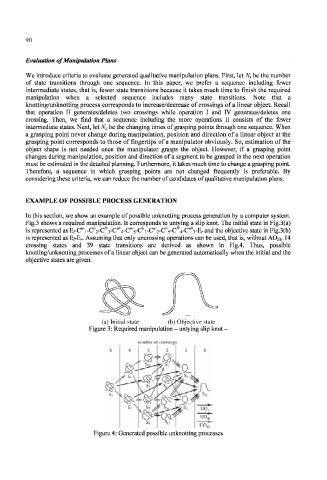
In this section, we show an example of possible unknotting process generation by a computer system.
Fig.3 shows a required manipulation. Tt corresponds to untying a slip knot. The initial state in Fig.3(a)
/+
+
/
/+
/
+
is represented as E/-C"VC" 2-C 3-C" 4-C"" 5-CVC"~2-C~5-C 4-C" 3-Er and the objective state in Fig.3(b)
is represented as E/-E r. Assuming that only uncrossing operations can be used, that is, without AOni, 14
crossing states and 39 state transitions are derived as shown in Fig.4. Thus, possible
knotting/unknotting processes of a linear object can be generated automatically when the initial and the
objective states are given.
(b) Objective state
(a) Initial state
(a) Initial state (b) Objective state
Figure 3: Required manipulation - untying slip knot -
number of crossings
Figure 4: Generated possible unknotting processes