
Page 105 - Mechatronics for Safety, Security and Dependability in a New Era
P. 105
Ch19-I044963.fm Page 89 Tuesday, August 1, 2006 2:54 PM
Tuesday, August
Page 89
2:54 PM
1, 2006
Ch19-I044963.fm
89
moving direction for one state transition. In addition, for detailed planning and actual execution of
manipulation, we have to narrow down qualitative manipulation plans. Therefore, we introduce criteria
to evaluate qualitative manipulation plans.
Definition of Actions
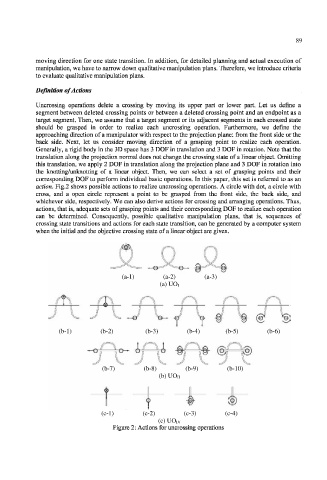
Uncrossing operations delete a crossing by moving its upper part or lower part. Let us define a
segment between deleted crossing points or between a deleted crossing point and an endpoint as a
target segment. Then, we assume that a target segment or its adjacent segments in each crossed state
should be grasped in order to realize each uncrossing operation. Furthermore, we define the
approaching direction of a manipulator with respect to the projection plane: from the front side or the
back side. Next, let us consider moving direction of a grasping point to realize each operation.
Generally, a rigid body in the 3D space has 3 DOF in translation and 3 DOF in rotation. Note that the
translation along the projection normal does not change the crossing state of a lrnear object. Omitting
this translation, we apply 2 DOF in translation along the projection plane and 3 DOF in rotation into
the knotting/unknotting of a linear object. Then, we can select a set of grasping points and their
corresponding DOF to perform individual basic operations. In this paper, this set is referred to as an
action. Fig.2 shows possible actions to realize uncrossing operations. A circle with dot, a circle with
cross, and a open circle represent a point to be grasped from the front side, the back side, and
whichever side, respectively. We can also derive actions for crossing and arranging operations. Thus,
actions, that is, adequate sets of grasping points and their corresponding DOF to realize each operation
can be determined. Consequently, possible qualitative manipulation plans, that is, sequences of
crossing state transitions and actions for each state transition, can be generated by a computer system
when the initial and the objective crossing state of a linear object are given.
(a-1) (a-2) (a-3)
(a-3)
(a-2)
(a-1)
(a) UOI
(a) UO I
J *
(b-1)
(b-1) (b-2) (b-3) (b-4) (b-5) (b-6)
(b-7) (b-8) (b-9) (b-10)
(b-7)
(b) UOII
(b) UO II
(c-4)
(c-1)
(c-1) (c-2) (c-3) (c-4)
(c-3)
(c-2)
(c) UOIV
(c) UO IV
Figure 2: Actions for uncrossing operations